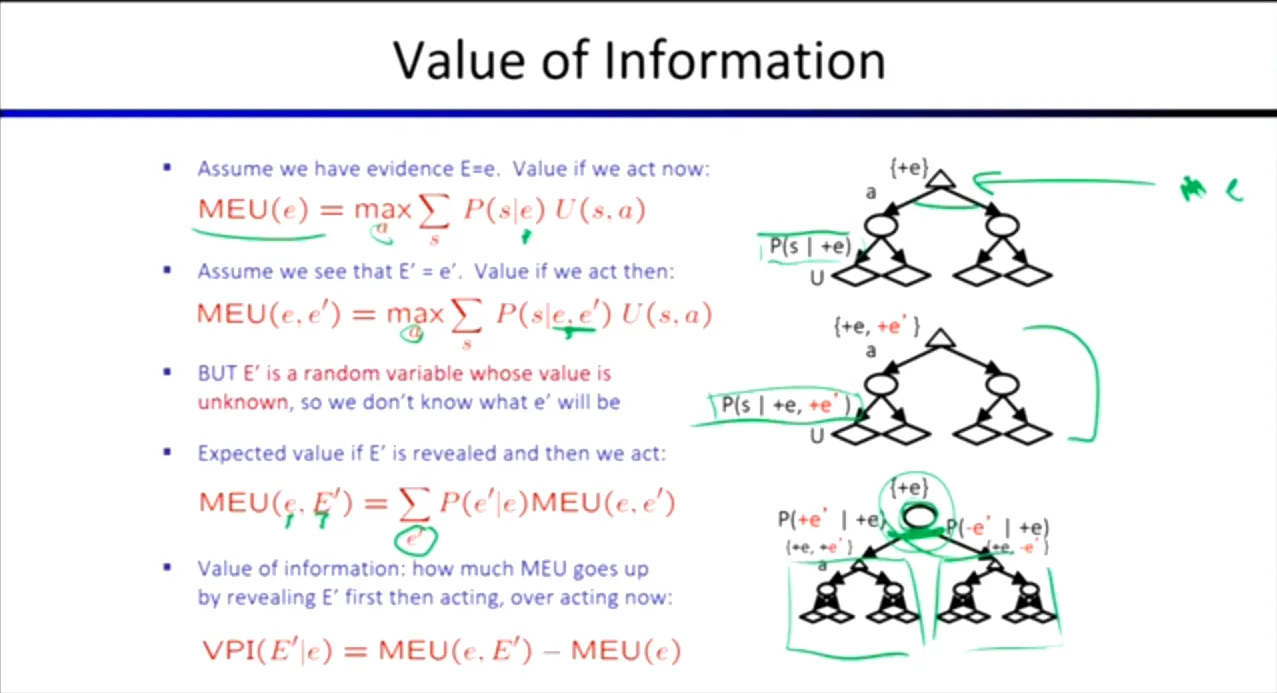
完全信息的价值 (Value of Perfect Information, VPI)
不止具体的行动 (Action) 有相应的效用,获取信息的过程也可以计算相应的价值 (Value),因为信息会直接影响未来的行动决策。
-
VPI = 知道信息 后的最大期望效用 (MEU) - 不知道信息 时的最大期望效用 (MEU)
-
核心性质:
- 非负性:VPI 永远是非负的 (),即多知道信息永远不会让情况变得更糟。
- 不可加性:VPI 不满足可加性(知道信息 A 的价值 + 知道信息 B 的价值 同时知道 A 和 B 的价值)。
平稳分布 (Stationary Distribution)
- 根据马尔可夫链的定理,当时间趋于无限 () 时,状态的概率分布会固定下来,不再随时间变化。平稳分布与初始状态无关,只与转移函数有关。
- 经典应用:
- Google PageRank:早期谷歌搜索引擎的核心算法。数学本质上就是求网页链接构成的马尔可夫链的平稳分布概率。直接把算出来的概率当作网页排名的分数,概率越大的网页排得越靠前。
- Gibbs Sampling:吉布斯采样的重复采样过程,其结果表明变量赋值的分布最终将收敛于平稳分布(即真实的后验分布)。
隐马尔可夫模型 (Hidden Markov Model, HMM)
除了一系列状态序列,HMM 还可以观察输出。通过观察证据变量 (Evidence),能够推断出隐藏状态 (Hidden States) 的后验分布。
- 应用领域:语音识别、机器翻译、机器人追踪/定位等。
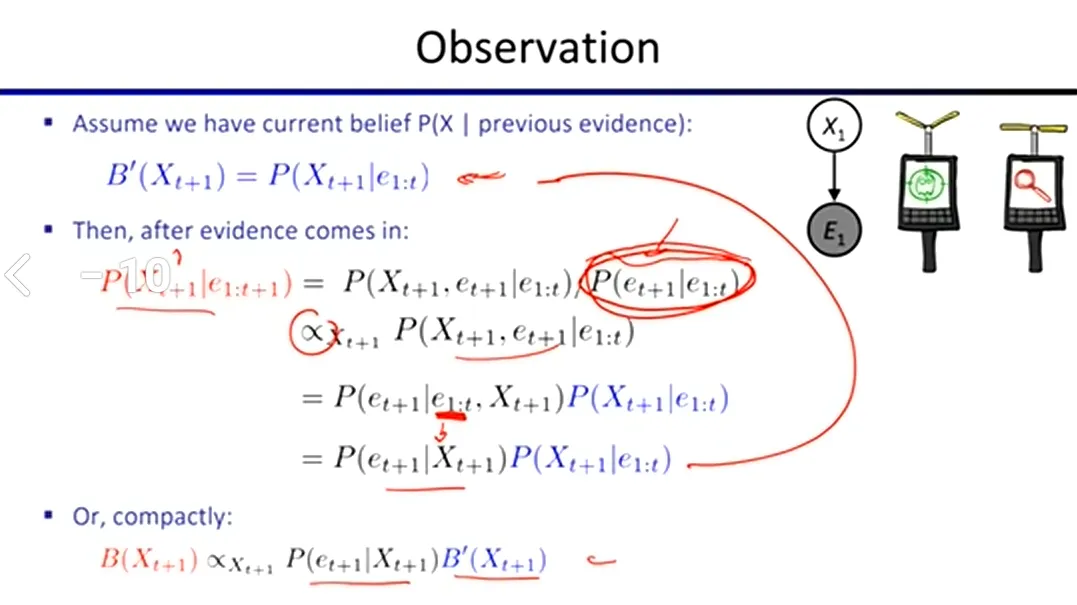
状态追踪的“两步走”过程
-
预测 (Predict):在还没看到任何新证据时,根据“现在的信念”,推测下一秒的状态(时间流逝)。
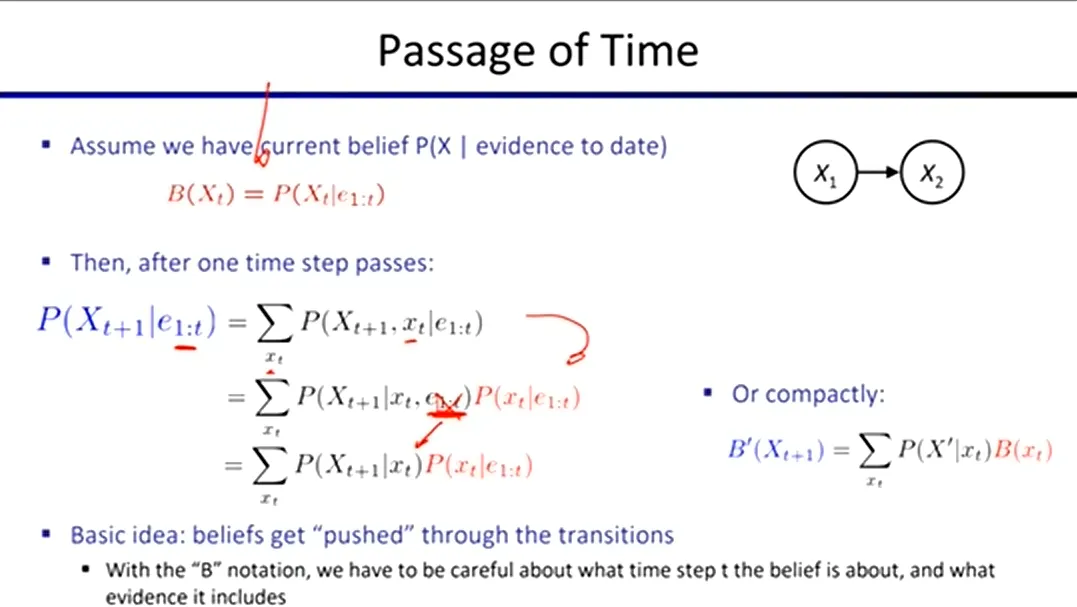
-
更新 (Update):在下一秒,传感器拿到观测数据,用新证据来更新推测。
前向算法 (The Forward Algorithm)
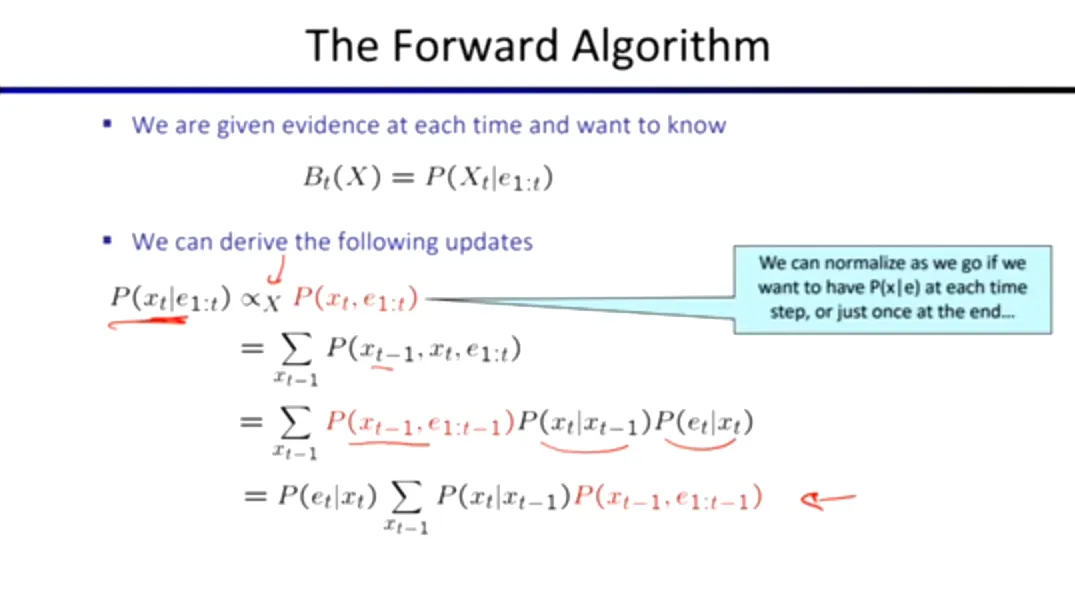
前向算法把“预测”和“更新”这两步揉成了一个可以通过计算机循环迭代的递归公式:
- 算法公式中的 (求和符号) 以及它后面的部分,代表时间流逝(预测)。
- 求和符号外面的 ,代表观测(更新)。
- 等式右边最右侧的项 正比于在 时刻的预测结果 。
HMM 的局限性
真实世界的 HMM 状态可能多达几万种(如语音识别),甚至状态空间是无限大、连续的(如机器人定位)。在这种情况下,需要穷举所有状态的前向算法在算力上就彻底报废了。
粒子滤波 (Particle Filtering)
为了解决 HMM 在面对海量状态或连续状态时的算力瓶颈,我们只能使用蒙特卡洛随机采样的方法来做近似推理,这就是粒子滤波。
- 追踪几十上百个粒子(特定样本),比追踪整个庞大/无限的概率空间要容易得多。
- 将“粒子列表”存储在内存中,这些粒子代表了 Agent 当前的假设,并且总体上代表了信念分布 (Belief Distribution)。
- 执行步骤:
- Elapse Time (时间流逝):根据物理模型,逐个更新/移动列表中的粒子。
- Observe (观测):根据传感器获取的数据,为每个粒子计算权重 (Weight)。
- Resample (重采样):把权重归一化后,根据权重大小对粒子进行重新采样(淘汰低权重,复制高权重)。
同步定位与建图 (SLAM)
- 既不知道地图长什么样,也不知道自己在哪,机器人需要同时进行定位和地图构建。
- 主流技术:
- 卡尔曼滤波 Kalman filtering (Gaussian HMMs)
- 粒子方法 Particle methods
- SLAM 中的粒子含义:在 SLAM 中,每一个粒子不再仅仅代表一个猜测的坐标,而是代表:一个猜测的坐标 + 一张它自己画出来的完整地图。
部分可观测马尔可夫决策过程 (POMDPs)
POMDP 是基于信念状态 (Belief State) 的 MDP。因为 Agent 并不确定自己目前到底处于什么客观状态,只能根据目前掌握的证据形成一个概率分布。
- 这是一个比普通 MDP 难得多的问题,在计算复杂性理论中属于 PSPACE-hard。
POMDP = MDP + HMM
-
MDP 侧:处理动作 (Actions) 和奖励 (Rewards),负责寻找最优策略。
-
HMM 侧 (Bayes Filter):处理隐变量 (Hidden States) 和噪音观测 (Evidence),负责做概率追踪。
-
它要求 Agent 一边像 HMM 那样根据嘈杂的传感器数据更新自己的概率信念 (Belief Update),一边像 MDP 那样根据当前的信念选择能拿到最大期望分数的动作 (Action Selection)。
-
因为求解精确的最优策略太难了,现代 AI 几乎放弃了求绝对最优解,而是大量使用近似算法(例如:蒙特卡洛树搜索 MCTS、深度强化学习 Deep RL)。