强化学习
(Reinforcement Learning, RL)
核心背景:无模型环境下的试错学习
- 问题设定: 我们仍然面对一个马尔可夫决策过程 (MDP) 的环境结构,但现在我们完全不知道转移概率 和奖励函数 。
- 所以必须通过在环境中尝试各种动作、经历各种状态来学习如何做决策。
Model-Based Learning
- 核心思想:先学规则,再做规划。
- 步骤:
- 在环境中四处游荡,收集大量的经验数据 。
- 利用这些数据,拟合/估算出一个近似的环境模型(即计算出经验转移概率 和经验奖励 )。
- 把这个估算出的模型当作真实模型,然后退回到传统的 MDP 求解方法(如 Value Iteration 或 Policy Iteration),离线算出最优策略。
- 缺点: 如果环境极其复杂,拟合出一个完美的模型本身就非常困难,甚至是不可能的。
Model-Free Learning
- 核心思想:不学规则,直接学“经验直觉”。 根本不去尝试猜测 和 是什么,直接在试错中评估状态或动作的好坏。它可以进一步细分为被动学习和主动学习。
被动学习 (Passive RL) - 策略评估
-
输入一个固定的策略 ,计算每个状态下的 ,对策略进行评估。
-
直接评估 (Direct Evaluation):
- 机械地记录每次经过状态 后直到游戏结束所获得的总奖励,然后把所有样本的最终得分加起来取平均值。但它孤立地看待每个状态,忽略了状态之间的马尔可夫联系,且在复杂环境中,不可能总是能从同一个状态重复出发很多次来算平均。
-
间接评估 (Indirect / Temporal Difference Learning, TD Learning):
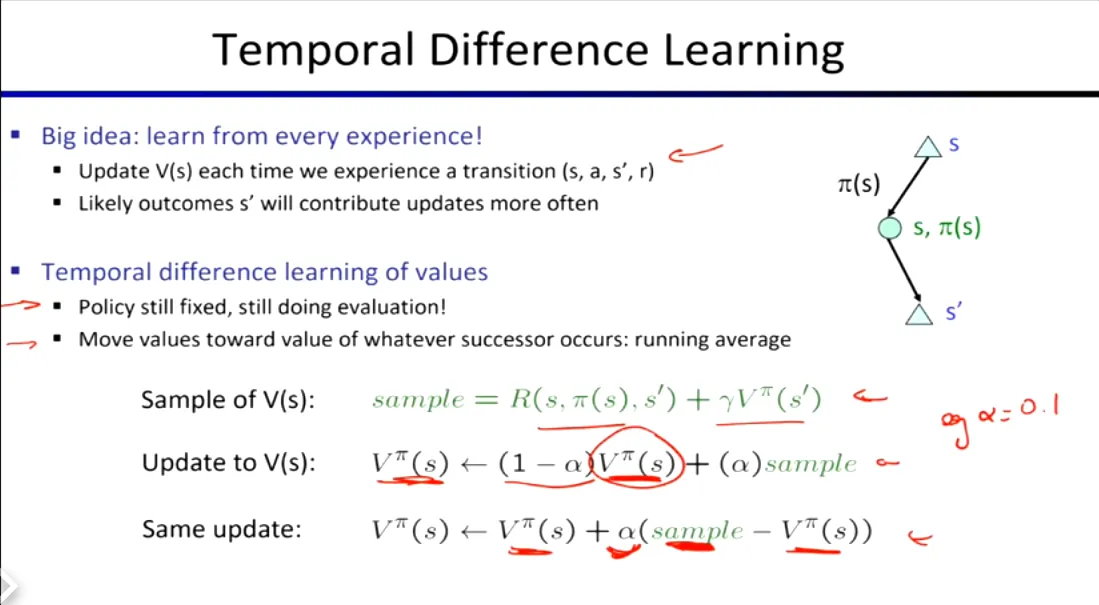
- 从每一次单步经验中学习,不需要等游戏结束,只要走了一步 ,就利用贝尔曼方程的思想,把对未来状态 的估值“回传”给当前状态 ,通过滑动平均的方式增量更新 ,用采样代替期望。但 TD Learning 只能评估固定的策略。正如之前讨论的,就算你算出了极其精确的 值,由于你没有模型 和 ,你依然不知道该怎么改进策略(无法提取 )。
主动学习 (Active RL) - 策略改进
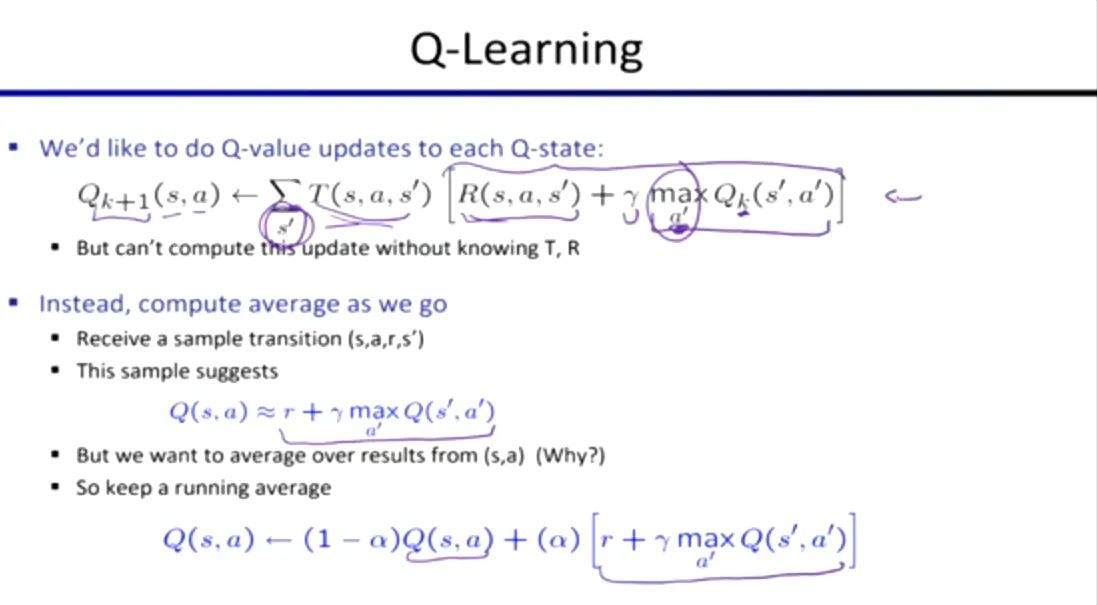
- Q-Learning (经典表格型无模型学习):
- 放弃迭代 值,转而直接在探索中进行 Q 值的迭代更新。
Q-Learning with exploration
如果在学习初期就完全按照现有的 Q 值贪婪地做决定,智能体极易陷入局部最优。
-
-Greedy (带有探索的 Q-Learning)
- 为了充分探索,在行动时强行加入一点随机性:以较小的概率 随机行动,以较大的概率 按当前最优策略行动。
- 随着时间推移(经验越来越丰富),不断减小 的值,直到完全依赖策略。
-
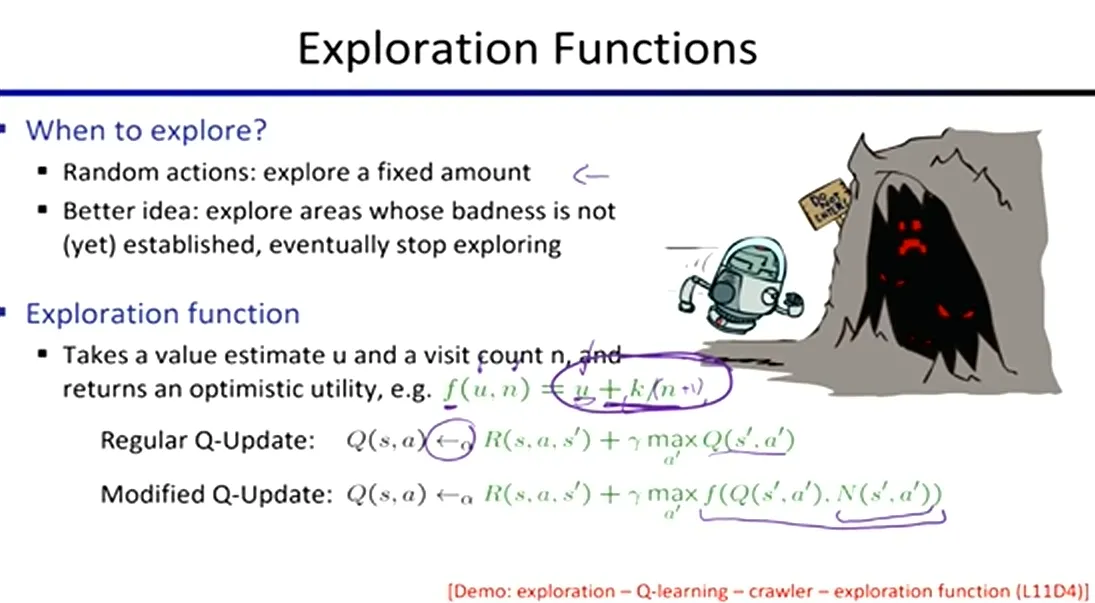
Exploration Functions (主动探索函数)
- 与其盲目掷骰子,不如将“好奇心”量化。将一个奖励探索的函数 直接写入 Q 值的更新公式中。对于那些去过次数 较少的未知区域,给予极高的伪估值。这种“盲目乐观”会驱动智能体主动且笔直地探索地图的每一个未知角落。
Approximate Q-Learning
- 先从经验中学习较少数量的状态,再将学到的规律泛化 (Generalize) 推广到其他相似状态。那就需要用一组特征 (比如“离幽灵的距离”) 来表示各种复杂状态。将 Q 值拆解为这些特征的线性组合 ()。
- 利用 Q-learning 算出的目标值计算误差,将误差对权重求导,通过梯度下降 (Gradient Descent) 来更新权重 。这就摆脱了 Q 表的物理限制。
Policy Search
- 直接从一个尚可的策略方案(一组权重)开始,让智能体跑完几局游戏。然后稍微调整权重(加一点随机扰动),再跑几局。看看会发生什么,如果总得分更高就保留新权重,如果更差就舍弃退回老权重,如此反复重复操作(爬山法 / 策略梯度)。
- 缺点: 往往需要比 Q-Learning 多得多的经验局数,因为它只能在游戏结束后才知道微调是好是坏。
- 优点: 在面对极度复杂、Q 值函数根本无法用特征完美拟合的任务时,直接搜索动作概率反而更容易收敛,也更容易让人理解发生了什么。